- Therefore, adequate methods should be used in linear equation system solutions such as without calculating determinant or inverse matrix.
- Two of the most useful methods are Gaussian elimination and L-U decomposition.
- Elimination Methods. While it may be satisfactory for hand computations with small systems, it is inadequate for a large system (numbers may getting bigger!).
- The method that is called Gaussian elimination avoids this by subtracting
 times the first equation from the
times the first equation from the  equation to make the transformed numbers in the first column equal to zero.
equation to make the transformed numbers in the first column equal to zero.
- We do similarly for the rest of the columns.
- Observe that zeros may be created in the diagonal positions even if they are not present in the original matrix of coefficients.
- As a result, the variable
 is eliminated in the other equations and the new system of equations becomes:
is eliminated in the other equations and the new system of equations becomes:
- Notice that in this new system of equations at first stage, the coefficient of the
 term in the row and the constant
term in the row and the constant  are as follows:
are as follows:
- Next, let
 (If not, pivoting) in this new system of equations, then multiply the
(If not, pivoting) in this new system of equations, then multiply the  equation by (
equation by (
 ) and subtract it from the
) and subtract it from the  equation.
equation.
- Repeat this procedure up to equation
 as
as  times to obtain the upper-triangular form:
times to obtain the upper-triangular form:
- As seen, the number of unknowns decreases by one in the and other equations as
 stage, decreases once again in the and other equations as stage and so on. In
stage, decreases once again in the and other equations as stage and so on. In
 stage, a single unknown is obtained.
stage, a single unknown is obtained.
- Then, the coefficient of the equation as
 stage is as follows:
stage is as follows:
 |
(6.1) |
 |
(6.2) |
- After reaching to the upper-triangular form, the solution is almost readily obtained.
- From the last equation in the upper-triangular form:
- All other unknowns are obtained consequently by backward-substitution. The general expression would be:
![$\displaystyle {\small\boxed{x_k=\frac{1}{a_{kk}^{(k-1)}}\left[ b_{k}^{(k-1)} - \sum_{j=k+1}^{n} a_{kj}^{(k-1)} x_j\right]}~~(k=n-1,\ldots,1)}$](img653.svg) |
(6.3) |
- Repeat the example of the previous section,
- The method we have just illustrated is called Gaussian elimination.
- In this example, no pivoting was required to make the largest coefficients be on the diagonal.
- Back-substitution, gives us

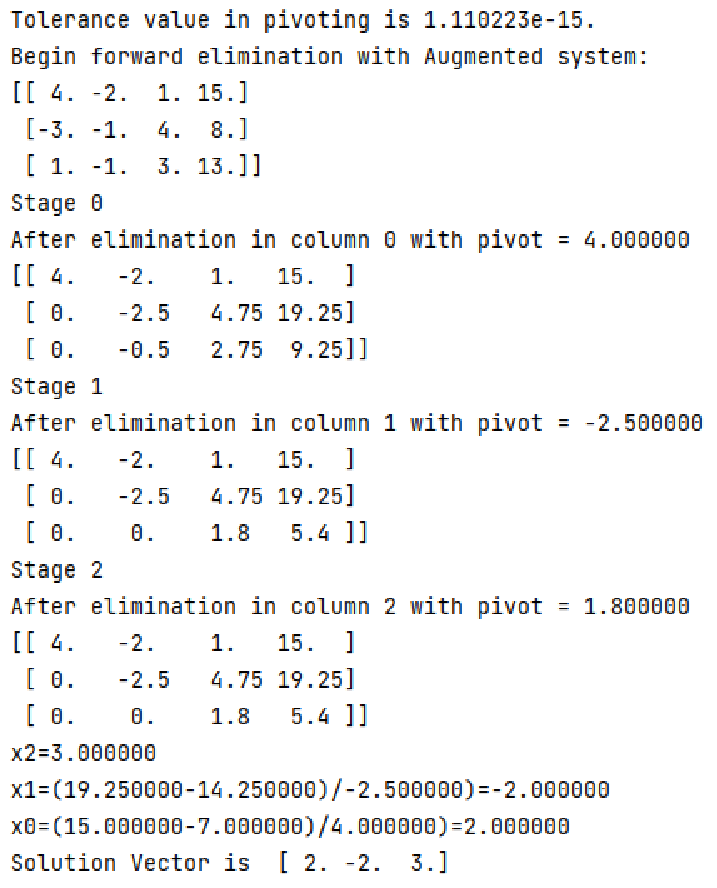
Example py-file: Show steps in Gaussian elimination and back substitution without pivoting.
myGEshow.py
Figure 6.1:
Steps in Gaussian elimination and back substitution without pivoting.
|
|
- if we had stored the ratio of coefficients in place of zero (we show these in parentheses), our final form would have been
- The original matrix can be written as the product:
- This procedure is called a
 -decomposition of
-decomposition of  . (
. ( )
)
- We have

- When there are m row interchanges

 (If not, pivoting), then multiply the
(If not, pivoting), then multiply the  ) and subtract it from
the
) and subtract it from
the  ) and subtract from the
) and subtract from the  equation.
equation.






















![\begin{indisplay}
\left[
\begin{array}{rrrr}
4 & -2 & 1 &15 \\
-3 & -1 & 4 &8 \\
1 & -1 & 3 &13 \\
\end{array} \right],
\end{indisplay}](img590.svg)

![\begin{indisplay}
\left[
\begin{array}{rrrr}
4 & -2 & 1 &15 \\
0 & -2.5 & 4.75 &19.25 \\
0 & -0.5 & 2.75 & 9.25 \\
\end{array} \right],
\end{indisplay}](img655.svg)

![\begin{indisplay}
\left[
\begin{array}{rrrr}
4 & -2 & 1 &15 \\
0 & -2.5 & 4.75 & 19.25 \\
0 & 0 & 1.8 & 5.40 \\
\end{array} \right]
\end{indisplay}](img657.svg)
![\begin{indisplay}
\left[
\begin{array}{rrrr}
4 & -2 & 1 &15 \\
(-0.75) & -2.5...
... 19.25 \\
(0.25) & (0.20) & 1.8 & 5.40 \\
\end{array} \right]
\end{indisplay}](img659.svg)

![\begin{indisplay}
\underbrace{\left[
\begin{array}{rrr}
1 & 0 & 0 \\
-0.75 & 1 & 0 \\
0.25 & 0.20 & 1 \\
\end{array} \right]}_L*
\end{indisplay}](img661.svg)
![\begin{indisplay}
\underbrace{\left[
\begin{array}{rrr}
4 & -2 & 1 \\
0 & -2.5 & 4.75 \\
0 & 0 & 1.8 \\
\end{array} \right]}_U
\end{indisplay}](img662.svg)