Next: Using the LU Matrix Up: Elimination Methods Previous: Gaussian Elimination Contents
 ,
,
 and
and  ,
,  . System of linear equations becomes as follows:
. System of linear equations becomes as follows:


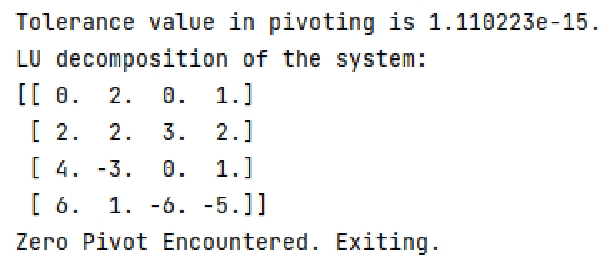
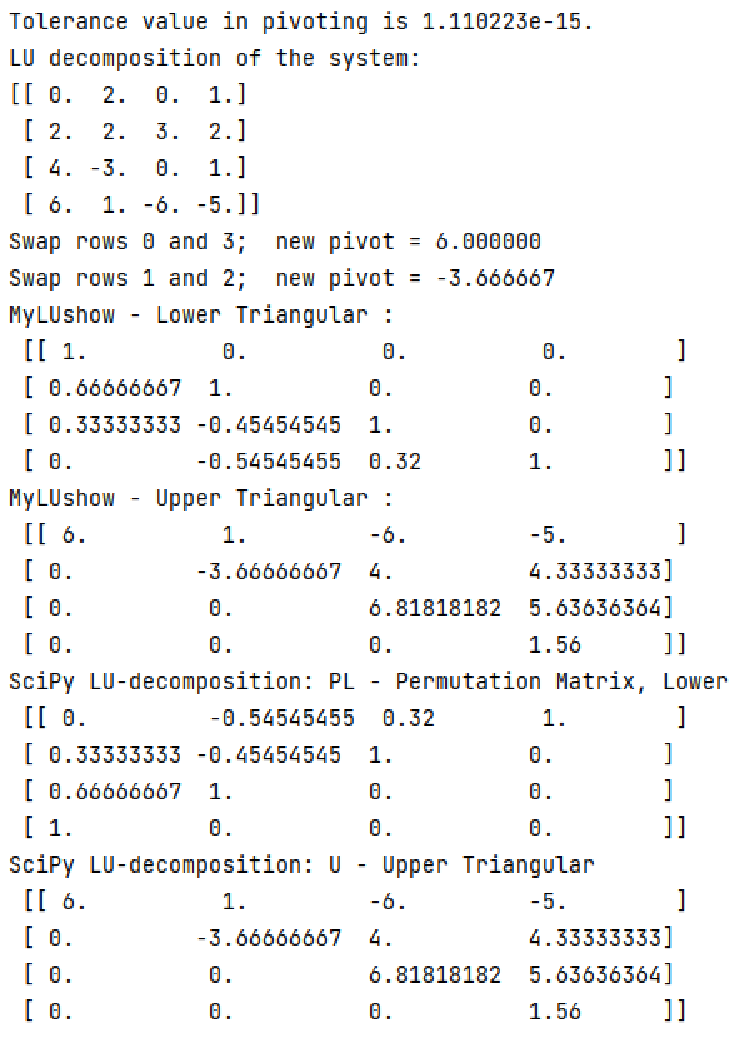
 decomposition of this matrix.
decomposition of this matrix.
![\begin{indisplay}
\left[
\begin{array}{rrrrr}
0 & 2 & 0 & 1 &0 \\
2 & 2 & 3 &...
...4 & -3 & 0 & 1 &-7 \\
6 & 1 &-6 &-5 &6 \\
\end{array} \right]
\end{indisplay}](img674.svg)
 position because that element is the pivot in reducing the first column.
position because that element is the pivot in reducing the first column.
|
![\begin{indisplay}
\left[
\begin{array}{rrrrr}
6 & 1 &-6 &-5 &6 \\
2 & 2 & 3 &...
...4 & -3 & 0 & 1 &-7 \\
0 & 2 & 0 & 1 &0 \\
\end{array} \right]
\end{indisplay}](img676.svg)
|
|
![\begin{indisplay}
\left[
\begin{array}{rrrrr}
6 & 1 &-6 &-5 &6 \\
0 &1.6667& ...
...67 & 4 &4.3333&-11 \\
0 & 2 & 0 & 1 &0 \\
\end{array} \right]
\end{indisplay}](img677.svg)
|
![\begin{indisplay}
\left[
\begin{array}{rrrrr}
6 & 1 &-6 &-5 &6 \\
0 &-3.6667 ...
...6667& 5 &3.6667&-4 \\
0 & 2 & 0 & 1 &0 \\
\end{array} \right]
\end{indisplay}](img678.svg)
![\begin{indisplay}
\left[
\begin{array}{rrrrr}
6 & 1 &-6 &-5 &6 \\
0 &-3.6667 ...
...001\\
0 & 0 & 2.1818 & 3.3636 &-5.9999 \\
\end{array} \right]
\end{indisplay}](img679.svg)
![\begin{indisplay}
\left[
\begin{array}{rrrrr}
6 & 1 &-6 &-5 &6 \\
0 &-3.6667 ...
...&-9.0001\\
0 & 0 & 0 & 1.5600 &-3.1199 \\
\end{array} \right]
\end{indisplay}](img680.svg)
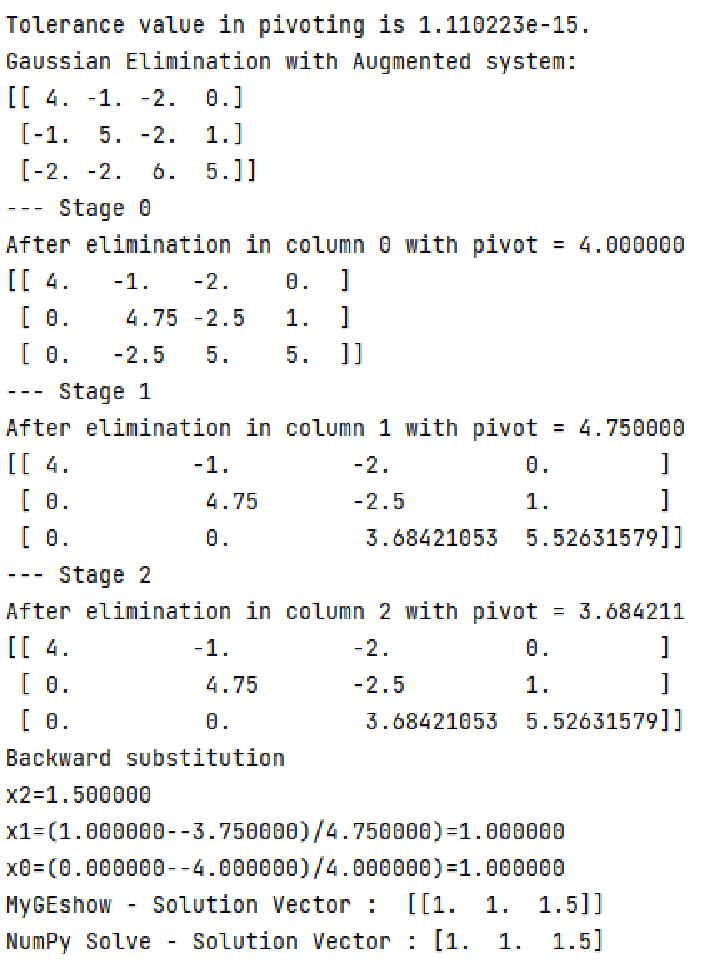
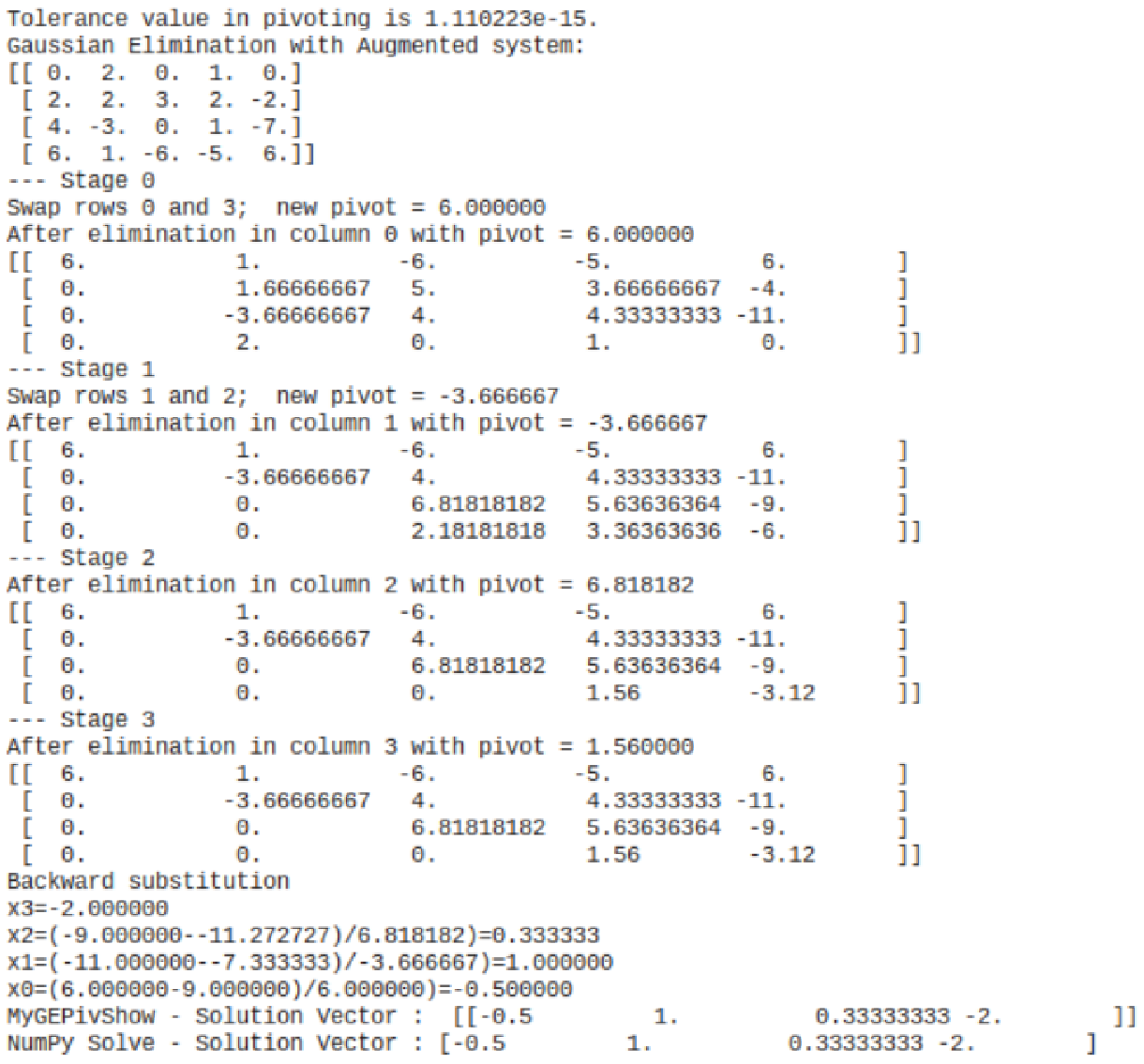
| 7 | Back-substitution gives

 .
In this calculation we have carried five significant figures and rounded each calculation.
Even so, we do not have five-digit accuracy in the answers. The discrepancy is due to round off.
Example py-file: Show steps in Gauss elimination and back substitution with pivoting.
myGEPivShow.py .
In this calculation we have carried five significant figures and rounded each calculation.
Even so, we do not have five-digit accuracy in the answers. The discrepancy is due to round off.
Example py-file: Show steps in Gauss elimination and back substitution with pivoting.
myGEPivShow.py
|
![\begin{indisplay}
\left[
\begin{array}{rrrrr}
6 & 1 &-6 &-5 &6 \\
(0.66667) &...
... & (-0.54545) & (0.32) & 1.5600 &-3.1199 \\
\end{array} \right]
\end{indisplay}](img683.svg)
|
![\begin{indisplay}
\left[
\begin{array}{rrrrr}
1&0&0&0\\
0.66667 & 1 & 0 & 0 \...
...54 & 1 &0 \\
0.0 & -0.54545 & 0.32 & 1 \\
\end{array} \right]
\end{indisplay}](img684.svg)
|
|
![\begin{indisplay}
\left[
\begin{array}{rrrr}
6 & 1 &-6 &-5 \\
0&-3.6667 & 4 ...
... 0 & 6.8182 &5.6364\\
0& 0 &0 & 1.5600 \\
\end{array} \right]
\end{indisplay}](img685.svg)
|
 , where
, where
![\begin{indisplay}
A'=\left[
\begin{array}{rrrr}
6 & 1 &-6 &-5 \\
4 & -3 & 0 & 1 \\
2 & 2 & 3 & 2 \\
0 & 2 & 0 & 1 \\
\end{array} \right]
\end{indisplay}](img687.svg)
 decomposition of the matrix, , which is just the original matrix,
decomposition of the matrix, , which is just the original matrix,  , after we have interchanged its rows.
, after we have interchanged its rows.